解题注意
大约 4 分钟
解题注意
易错总结
切应变负号含义
- 对于 , 表示微面方向, 表示切应力方向
- 在莫尔圆中 与 表示一个点
莫尔圆与实际值的转换
实际值为莫尔圆周上的点, 需要注意
- 圆心的位置
- 莫尔圆上的旋转角为方位角 的两倍
- 莫尔圆上的 轴对应的是主方向, 还需要旋0转 得到 轴对应的方向
应力与应变的关系
- 应力与应变的转换需要考虑泊松效应
- 某个方向上应力为 , 应变不一定为
弯曲剪应力
可求出 / 无说明不要求时, 需要计算 (如已知应变求力), 但通常在危险点 (外表面) 上为
最大弯曲剪应力
- 梁的最大弯曲剪应力点必定在截面的形心上 (中性轴)
- 对于矩形截面梁
- 对于圆截面梁
柔度判断
柔度越大, 压感的极限应力越小, 大柔度杆为
杆件受力分析
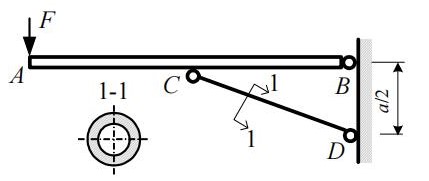
- 对于仅受两个力的杆件 (任意刚体), 即可视为二力杆, 二力杆仅受拉或受压 (通常用于稳定性分析), 通过引入二力杆以简化受力分析过程
- 如图中杆 上仅有两个约束力, 因此为二力杆; 杆 上除约束力外还有一个外力, 因此为一般杆件
- 因此铰链 具有两个方向的约束力, 而 上的约束力沿杆件方向, 仅需对 点取矩即可求出 杆的压力
- 在刚体受力分析中, 通过对不重要的力所在直线上的点取矩, 避开求此力
- 对斜方向的力求矩时, 最好将力正交分解为两个力分别求矩, 便于求力臂
弯矩图方向
当采用一般方法判断弯矩正方向后, 弯矩图的正值应画在钢架内侧
虚拟力系
- 在相对移动 / 相对静不定问题中, 添加的虚拟力应为一对在相对点上的力系, 力 (力偶) 方向对称, 大小相同
- 当采用受拉为正时, 截断桁架产生的约束力方向应与截面法向相同
弯矩分析
- 存在集中弯矩时, 此处的弯矩将会突变, 不能遗漏
- 对于铰链杆, 注意集中弯矩在铰链的哪一侧, 集中弯矩的位置对结果有影响
- 对直杆上的点也可视为钢架的拐角点分析, 从而重置坐标系便于积分
- 拐角点分析中, 必须将所有被分析过的部分的外力移到拐角点上再继续分析, 并且拐角点上的弯矩在左右连续 (集中弯矩除外) , 并将已分析部分的弯矩在新的分析部分中作为常数
- 通过检查各段弯矩是否连续, 在集中弯矩处是否突变, 最后取值是否为 (最后有固定约束时不一定), 确定弯矩是否正确
自由度判断
- 定义物件总数 , 包括机架 (当不存在与机架连接的约束时则不包含)
- 一般铰链为低副, 滑动铰链为高副, 固定端约束则取 , 注意多重铰链
- 自由度满足 , 为被约束的自由度总数, 当 , 为超静定结构
直径与半径
- 求 公式中, 带入直径
- 求面积时, 如果使用直径计算, 则需要乘 , 且直径增加两倍厚度
- 求弯曲应力中的 为到中性轴的距离, 因此为 或
- 求偏心压缩的弯矩 (斜齿轮) 或扭矩时, 力臂长度一般为半径