能量法
大约 12 分钟
能量法
克拉贝隆原理
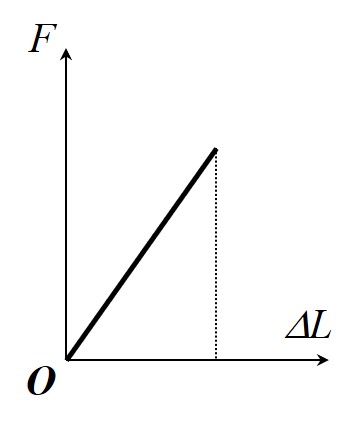
- 定义应变能 为物体发生应变后的内能, 根据能量守恒其值等于外力使物体变形时在物体上的做功 , 其中 为外力的位移, 同时也是物体的变形量
- 对于线弹性材料, 外力大小与形变量成正比, 有 , 因此曲线 与坐标轴围成一个直角三角形
- 定义 为平衡状态下的外力, 满足 , 因此, 对于任意个外力 以及其产生的形变 , 应变能满足
应变能计算
- 克拉贝隆原理中, 需要分别求出外力与形变量, 不方便使用
- 通过截面法截取微段 , 微段截面上的内力即对微段的外力, 微段的形变量也仅与微段所受的外力有关, 对微段的应变能积分即可得到物体的应变能, 且应变能的结果仅与内力有关
- 由于弯曲切应力的应变能为其他应变能的高阶无穷小, 因此在能量法中一般不讨论弯曲切应力
基本变形的应变能
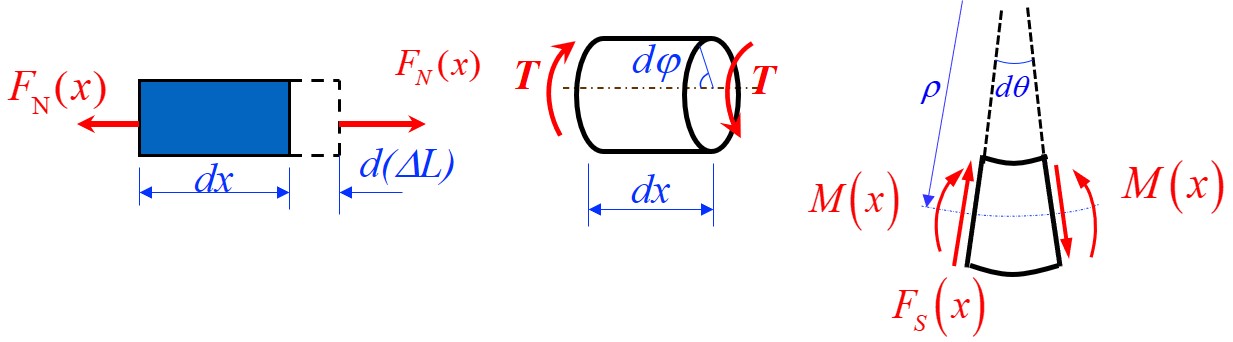
- 拉压变形
- 扭转变形
- 弯曲变形
组合变形的应变能
- 由于应变能为内力的二次关系, 因此一般情况下应变能不可叠加
- 注意此处叠加是指叠加由各个力产生的内力计算得到的应变能, 相当于
- 但将各个力产生的内力先叠加得到总内力, 再计算应变能是允许的 (内力可由外力叠加得到), 相当于 , 两式显然不同
- 对于不同类型内力产生的应变能 ( 方向的弯曲变形也属于不同类型), 不考虑剪力时, 认为之间的变形不耦合, 因此可以进行叠加
应变能积分
- 对于一般钢架与轴, 在具体分析各段杆的内力后, 可使用杆上点的坐标表示各个微段, 并求出内力函数, 但注意积分方向必须与截面移动方向, 截面法向相同, 此时有 (以 坐标为例, 假设仅有弯矩)
- 对于圆弧形杆件
- 可采用角度坐标表示内力, eg
- 积分时需要有坐标变换 , 且积分方向与分析方向要一致
- 由于圆弧上微段的法线方向不固定, 因此截面坐标轴轴方向也不固定, 其中 始终平行于截面, 始终垂直于截面, 求内力时要注意不同角度下轴的方向
卡氏定律
- 在力 作用下, 物体发生形变 , 对于物体的总应变能 , 形变满足 (假设仅有弯矩)
- 公式中积分计算与偏导计算无先后顺序, 一般先求偏导再积分
- 集中力 对应的位移是直线位移 , 集中力偶对应的位移是角位移 (转角) , 其中位移的正方向与力的方向相同
虚拟力法求任意方向的形变
- 如果要求结构上任意一点的位移, 并且位移与外力无关时, 可在结构上添加一个虚拟力, 然后令结果中的虚拟力为 即可
- 在求出偏导后, 即可令 , 再进行积分, 简化积分运算
- 求相对位移时, 则需要在两个相对点添加一对对称的力系 (力偶系), 并单独分析力系的影响分析时, 从一个点分析至另一个点, 仍要考虑约束
解题过程
- 添加虚拟力 (如果所求点位移不能由外力直接求出)
- 确定各根杆的分析方向 (一般从无约束段开始, 对同一根杆上的各个力必须统一)
- 根据题目要求与受力分别求出各个外力作用下的内力 (使用叠加法便于分析)
- 弯曲钢架一般不考虑
- 无扭转变形时不考虑
- 剪力不考虑
- 对要求位移的部分求偏导 (如果不包含 , 则偏导结果即为 , 可不考虑)
- 将 带入偏导与内力结果中
- 先对内力与偏导结果分别叠加, 再积分得到位移 (假设仅有弯矩)
平衡力系作用下的形变
在没有约束的平衡力系中, 求出的形变是物体的相对形变, 因此可将其中一个或几个与位移无关的力视为固定约束, 求出的形变即相对这些力的形变
互等定律
- 定义位移 , 表示位移方向与位置与 相同, 表示位移在 作用下产生
- 对于两个不同力系对同一个物体作用下, 有 (同方向的位移与力相乘才有意义)
- 当两个力系共同作用时, 则实际位移为
- 可通过互等定律转化对特定位置位移的求解 (转化为一个作用在目标位置的虚拟力, 求其在实际力作用位置产生的位移)
超静定问题
- 超静定问题中首先判断超静定的次数 , 然后去除 个多余约束, 将其转变为未知约束力
- 根据自由度分析超静定次数, ( 为物件数, 如果有与机架相连的部分则要包含机架)
- 对于无固定约束的机构, 则 即为物件数
- 对于固定约束连接的几个物体认为是同一个
- 分析外力与约束力 (包括未知与已知) 得到内力 (物理方程)
- 去除约束得到的未知力依然满足约束效果, 即未知约束力的位移 (几何协调条件)
- 由于超静定问题中几何协调条件的特点, 可使用力法正则方程表示几何协调条件
- 对于问题中的刚体, 其应变能为 , 因此可不分析刚体的内力与应变能 (但刚体对弹性体的影响仍要考虑)
力法正则方程
- 三种基本变形的静不定问题均可用力法正则方程, 且相互之间不耦合, 此处以弯曲变形为例
- 超静定问题中, 通常以约束力为待求量, 因此使用 表示未知约束力
- 将未知力从其产生的内力中提出, 得到 , 根据卡氏定律, 对于集中力与集中力偶
- 定义柔度系数
其中
- 根据卡氏定理即可得到力 在 处产生的位移效果 (不是实际位移) 与 处的总位移满足
- 整理几何协调条件即可得到力法正则方程 ( 为外力系)
- 对于多个外力, 也可分别分析再使用叠加法求出
- 求出未知约束力 后可带入得到实际截面弯矩 , 用于通过卡氏定理求解某个点的形变
- 注意内力图等可能会分成多段, 每一段都要计算
桁架静不定
- 由于桁架中的杆为二力杆, 因此各杆仅受轴向力且为常数 (与截面位置无关)
- 桁架受力分析方法与理论力学相同, 依然采用截面法, 并且以受拉为正 (受力与截面法线同向)
- 通过将杆件截断以去除约束, 截断的两个截面存在大小相同的拉力 (注意此拉力为内力, 因此应与截面法线同向), 对应的几何约束为两个截断面之间的距离保持为
- 注意杆虽然截断, 但其长度不变, 计算时必须考虑截断杆的应变能
- 在单独分析中, 截断杆的内力即未知约束力, 因此分析其他力时, 可将杆视为不存在; 但未知约束力对其他杆的内力要分析
- 同样最后可通过力法正则方程求解, 此时 (对每一根杆的内力都要计算)
- 桁架静不定中, 注意每一根杆的内力都要包括在内, 并且杆的长度不一定相同
对称结构的静不定
对称性条件
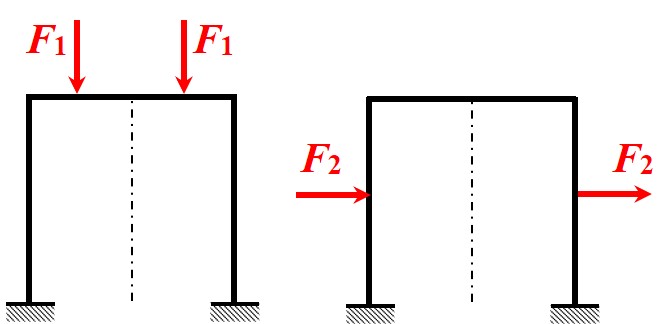
- 对称结构 结构在对称轴两侧完全重合, 这是使用对称性的前提
- 正对称载荷 结构上的载荷在沿对称轴对折后, 载荷的方向重合 (载荷的方向与作用点沿对称轴对称)
- 反对称载荷 结构上的载荷在沿对称轴对折后, 载荷的方向相反 (载荷的作用点沿对称轴对称, 但作用方向相反)
对称轴上内力的特点
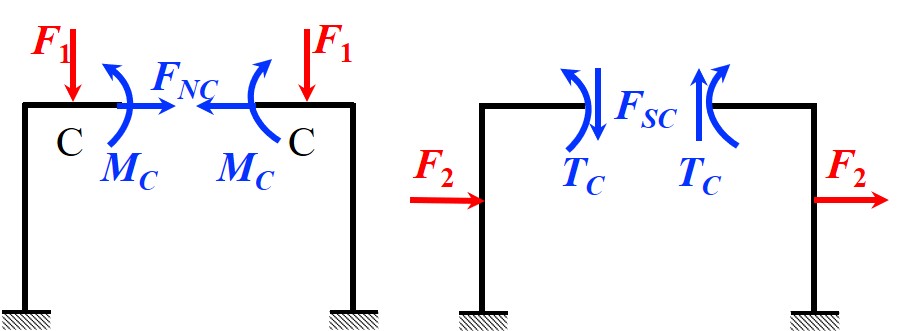
沿对称轴截开结构 (当对称轴上有杆件时, 可沿对称轴向左 / 右截, 并包含杆件), 其截面上的内力以及对称轴上微段的形变将满足以下特点
- 正对称载荷
- 截面内力
- 形变特点
- 等效约束力 (低副)
- 反对称载荷
- 截面内力
- 形变特点
- 等效约束力 (低副)
- 钢架内的铰链 可沿过铰链的截面截开钢架, 并将钢架内的铰链视为一种特殊的对称点处理 (通常与另外两种对称点叠加, 再次简化)
- 形变特点
- 等效约束力 (叠加时为高副) (正对称时为 ), (反对称时为 )
利用对称性简化结构
- 首先判断结构与载荷的对称性
- 沿结构的对称面截取得到子结构
- 根据截开点的截面特点, 将其等效为特定约束
- 判断子结构的自由度并求解超静定问题
- 根据子结构的受力情况, 形变与对称一侧对称 / 反对称, 得到结构的整体受力与形变
- 注意对称面截开机构后, 截面的方向与对称面一致, 因此截面上的轴力垂直于对称面, 剪力平行于对称面
额外变形量
额外变形量定义
- 材料的额外变形体现为材料在约束处已有变形量, 因此几何协调条件等式右侧还有一个从原始到约束的额外变形量
- 额外变形量大小为从原始状态 (经过膨胀 / 未装配) 到约束处的变形量 (通常为位移), 与约束力的方向同向时为正
- 存在额外变形量时, 立法正则方程为
热膨胀与装配应力
在静定状态下, 材料长度不匹配时结构能自动调整, 但在超静定状态下, 材料的变形 (装配间隙 / 热膨胀) 受到约束将产生附加内力
弹簧约束
- 弹簧可将其视为一个滑动铰链支座, 由于弹簧的特殊性, 应优先作为去除约束分析
- 弹簧也可使用额外变形量法分析, 对于弹簧, 其物体没有变形, 但约束位置 (弹簧自由端) 与弹簧受力有关, 从物体原始位置变形至弹簧自由惯将产生额外变形
- 注意力的相互作用, 例如当弹簧有向上的约束力时, 弹簧受压, 因此一般额外变形量为负, 有 ( 为弹簧刚度)
冲击载荷
- 在冲击载荷作用下 (具有动能与重力的物体), 弹性体将发生额外变形以将冲击载荷的动能转化为应变能, 此时弹性体将发生远大于平衡状态下的变形
- 定义以下物理量
- 冲击载荷的重力 (受力)
- 冲击载荷到达弹性体前受力的距离
- 冲击载荷作用下弹性体的变形
- 无冲击时弹性体的变形
- 弹性体在冲击点的刚度系数
- 即弹性体在外力 作用下的变形, 可通过卡氏定律求出
- 弹性体某一点的刚度系数满足 , 其中 为任意作用在该点上的力, 为弹性体相应的位移, 可在计算 的同时求出
- 已知刚度系数时, 弹性体的应变能满足 (此式也可用于求弹簧的应变能, 用于卡氏定律)
- 根据冲击载荷的能量完全转化为应变能可得到方程
通过解出方程即可得到 (取数值较大的解)
- 根据解出的 与 可以计算出动载荷等效的静载荷, 再由等效静载荷计算出等效应力等