应力状态与强度理论
应力状态理论
应力定义
- 应力通常与内力与截面形状有关, 内力相同截面不同时应力也不同, 但与外力无直接关系
- 对于物体截面上任意点的 K 处的应力为, 以 Pa(N/m2) 或 MPa(N/mm2) 为单位
p=dAdF
- 应力为一个矢量 (考虑截面方向则为张量), 定义应力沿截面法向分量为正应力 σ, 切向分量为切应力 τ
- 定义正应力的正方向为截面指向物体外的法向 (与轴力正方向相同)
- 当正应力 顺时针 旋转 <90∘ 到达切应力方向时, 认为是切应力的正方向, 并可再投影到两个正交方向上 (切应力方向与截面内力坐标轴无关)
- 在力平衡计算中 (如果需要), 应先使用积分 Fσ=∫σdAFτ=∫τdA 将应力合成为合力
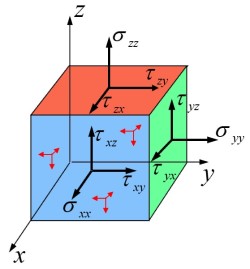
- 对于实际物体, 取其中的一个微立方体, 规定如图所示的三相应力状态
- 对于正应力, 下标表示应力所在轴
- 对于切应力, 下标 ab 中, a 表示切应力所在微面的方向, b 表示切应力方向
- 因此可使用一个 3×3 的矩阵 [σij] 来描述一个微立方体的应力状态
切应力互等原理
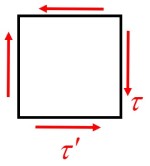
- 对于一个微立方体, 在其相互垂直的平面上, 垂直于平面交线的切应力数值相等
- 且方向均为指向或离开交线
- 由此可得在三相应力状态下, 有 (注意切应力方向)
τab=−τba
- 根据切应力互等, 应力状态矩阵 [σij] 为一个实对称矩阵
主应力
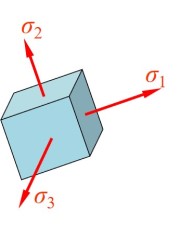
- 由于应力状态矩阵为实对称矩阵, 因此可以对其进行正交变换, 仅旋转坐标轴, 得到一个方向的微面上进存在正应力, 而不存在切应力
- 将坐标变换得到的三个应力称为主应力 σ1,σ2,σ3, 主应力与主应力方位客观存在, 并且可以为 0
- 按从大到小的顺序确定主应力的次序, 其中 σ1 最大
σ1≥σ2≥σ3
- 如果微立方体的一个面上应力为 0 (包括剪应力), 则称为平面应力状态, 注意平面应力状态下仍有三个主应力, 只是其中一个为 0
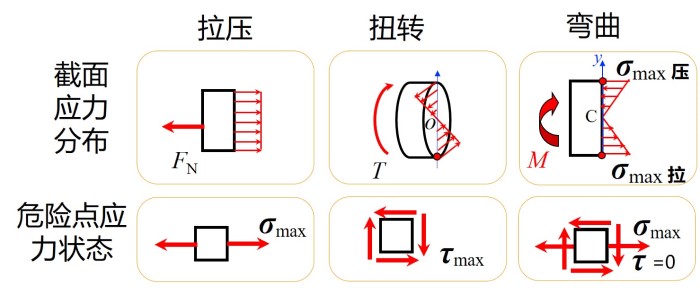
- 对于基本变形, 均为平面应力状态, 具体如下
应力莫尔圆法
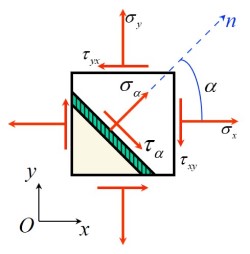
- 对于应力的正方向见应力定义
- 定义截面方位角 α 为 x 轴正方向逆时针旋转到截面法向 n 的角度 (旋转方向相反时取负)
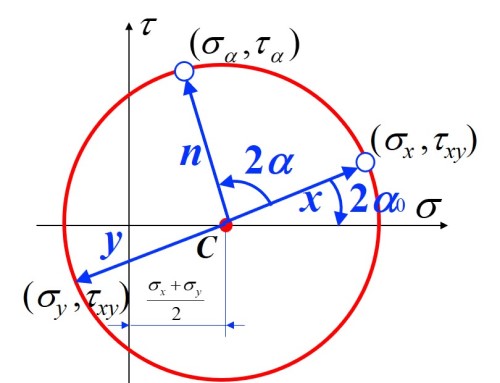
- 通过应力莫尔圆法, 以 σ 为 x 坐标, τ 为 y 坐标建立坐标系, 对于任意截面上的应力状态均可在莫尔圆上体现
- 以莫尔圆上一点所在的半径逆时针旋转 2α 即可得到与该点对应截面夹角为 α 的截面应力状态
- 由此可推出垂直平面的应力状态为莫尔圆的一条直径, 根据切应力互等, 莫尔圆的圆心必定在 x 轴上
莫尔圆求法
当 x 面与 y 面上的应力状态已知时, 通过以下步骤求出莫尔圆
- 根据切应力互等, τxy=−τyx, 确定 x 面上的切应力即可求出 y 面上的切应力 (注意负号), 并在坐标上标出两个面对应的点, 即可得到莫尔圆的一条直径
- 根据莫尔圆的性质可得, 莫尔圆的圆心满足
σc=2σx+σy
- 莫尔圆的半径即两点长度的一半
R=21(2σx−σy)2+τxy2
- 观察莫尔圆可得, 当 x,y 平面上的 τ 取最大值时, 即直径垂直于 x 轴, 因此
τmax/min′=±R/2
- 当取到主应力方向时, 即直径与 x 轴重合的情况, 在此直径下取得平面内的最大与最小主应力
σmax/min=σc±R
- 定义 α0 为主平面的方位角, 通常 x 面的应力状态与最大应力的应力状态半径进存在夹角 2α0 (注意正方向), 因此根据三角关系可得 α0 满足
α0=−21arctan(σx−σy2τxy)
- 平面应力状态下还有主应力 0, 因此三个主应力序号需要具体比较确定
- 对于其他已知条件, 可根据莫尔圆的特点与两个面的夹角求解
- 根据三向莫尔圆可得, 三个方向的主应力可分别组成三个相切的莫尔圆, 因此最大切应力满足 (注意最大切应力不一定在 xy 平面上)
τmax=2σ1−σ3
- 通过莫尔圆求出与方位角为 θ 时的应力状态
σα=θ=σc+Rcos[2(θ−α0)]
注意 α0 为从 x 方向到主方向的旋转角, −α0 才是 x 方向应力状态在莫尔圆上的夹角
莫尔圆坐标系中, σ 方向对应的是主方向, 不是 x 轴方向
广义胡克定律
泊松比
ε′=bb′−b
其中 b 为原始横向宽度, b′ 为变形后的横向宽度
- 在杆件弹性受拉时, 还将发生横向收缩, 其中变形满足比率关系, 称为泊松比 μ (注意负号, 轴向拉伸时横向收缩)
ε′=−με
- 根据应变能密度推到可得泊松比与剪切模量之间存在关系
G=2(1+μ)E
广义胡克定律
- 对于主应力方向上, 微立方体仅受正应力, 仅存在正应变, 因此微立方体的主应力方向即主应变方向, 带入胡克定律可得微立方体的正应变 (还需要考虑泊松比对其他方向应变的影响)
εi=Eσi−μ(Eσj+Eσk)
- 对于一般方向, 由于同时存在切应力, 因此还将存在切应变
γij=Gτij=Eτij2(1+μ)
- 认为切应变与正应变不耦合, 因此对一般方向的应力状态, 正应变公式依然成立
- 广义胡克定律对平面应力状态同样成立, 仅需取 σz=τij=0(i,j=x,y)
应变莫尔圆法
- 将 ε 与 γ/2 代换 σ 与 τ 即可得到适用于应变的莫尔圆公式
- 对于应变与应力, 其主平面的方位角 α0 相同
- 由于任意正交方向的应变均可由胡克定律求出对应应力, 因此通常由特殊方向应变求出 x,y 方向应变, 代入胡克定律得到应力, 再使用莫尔圆求解主应力
- 通常切应力较难测量, 因此通常为测出三个不同方向的正应变, 最后合成为平面应力状态, 当测量应变 ε0∘,ε45∘,ε90∘, 根据应变圆可得其与 x,y 方向应力之间满足
⎩⎨⎧εx=ε0∘εy=ε90∘γxy=ε0∘+ε90∘−2ε45∘
- 转换应变与应力时, 需要注意泊松效应的影响, 对于方位角为 θ 的应力, 其应变为
εα=θ=Eσα=θ−μEσα=θ+90∘
对于 x,y 轴上的转化同理
由于泊松效应, 因此当应力 σ=0 时, 同方位角下的应变 ε 不一定为 0, 还需要考虑与其夹角为 90∘ 方向下的应力 (σx=0,σy=0→ε=0)
应变能密度
体积应变
定义微立方体体积的变化率为体积应变 θ
θ=dVdV1−dV=ε1+ε2+ε3
其中 dV=dxdydz,dV′=(1+ε1)(1+ε2)(1+ε3)dV
体积改变能密度
将主应力分解为平均值 σm=(σ1+σ2+σ3)/3 与剩余部分, 平均值部分仅产生体积变化, 对应的应变能称为体积改变能 (注意泊松效应)
uV=6E1−2μ(σ1+σ2+σ3)2
畸变能密度
剩余部分仅产生形状变化, 对应的应变能称为畸变能
ud=6E1+μ[(σ1−σ2)2+(σ2−σ3)2+(σ3−σ1)2]
应变能密度
两部分能量恰好可线性叠加, 构成应变能
u=21(σ1ε1+σ2ε2+σ3ε3)
强度理论
适用 σrx 表示 x 强度理论下的等效应力, 用于与许用应力 [σ] 比较
第一强度理论 - 最大拉应力理论
- 判断依据: 脆性材料断裂的主要原因是最大拉应力达到极限
- 强度条件:
σr1=σ1≤[σ]
- 适用条件: 以多向受拉为主的脆性材料, 且 ∣σ3∣<σ1
第二强度理论 - 最大正应变理论
- 判断依据: 脆性材料断裂的主要原因是最大伸长应变达到极限
- 强度条件:
σr2=σ1−μ(σ2+σ3)≤[σ](ε1≤[ε])
第三强度理论 - 最大切应力理论
- 判断依据: 塑性材料失效的主要原因是最大切应力达到极限值
- 强度条件:
σr3=σ1−σ3≤[σ](τmax≤[τ])
第四强度理论 - 畸变能密度理论
- 判断依据: 塑性材料失效的主要原因是畸变能量密度达到极限值
- 强度条件:
σr4=21[(σ1−σ2)2+(σ2−σ3)2+(σ3−σ1)2]≤[σ](ud≤[ud])
- 适用范围 与第三强度理论适用条件相同, 当第三强度理论满足时, 自动满足
强度理论在弯扭组合变形的应用
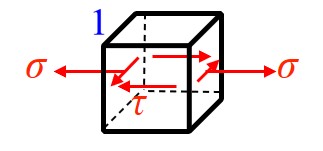
- 对于弯扭组合变形, 其处于拉剪平面应力状态, 在此应力状态下可得 (以下公式也适用于拉扭组合变形等具有相同应力状态的情况)
σr3=σ2+4τ2
σr4=σ2+3τ2
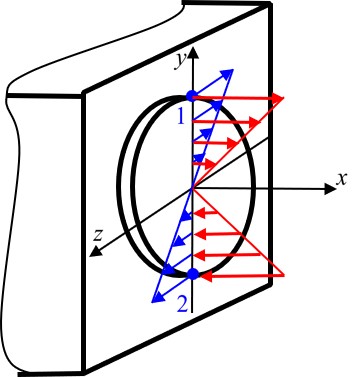
- 在弯扭组合变形中, 通常以圆 / 圆筒作为讨论对象, 危险点为截面最外侧上下两点, 此处弯曲正应力与扭转切应力达到最大 (弯曲剪应力为 0, 不是忽略)
- 其中危险点的应力满足
σ=WZMτ=WρT
- 带入弯扭组合变形下的应力后, 根据圆截面上 2WZ=Wρ , 可得 (以下结论仅适用于弯扭组合变形)
σr3=WZM(x)2+T(x)2
σr4=WZM(x)2+0.75T(x)2
- 由于圆截面选择任意方向作为弯曲方向均满足弯曲公式, 因此通常将 y,z 轴上的弯矩合成, 有 M=Mz2+My2
- 对于矩形截面, 其主轴固定为对称轴, 因此不能直接叠加弯矩 M, 仅能具体计算出各点的正应力 σ (通过叠加得到)