运动学
质点运动学
自然坐标系
设质点轨迹的指向运动方向的切向为 τ, 指向曲率圆心的法向 n, 将 τ,n 构成的坐标系称为自然坐标系
速度表示
自然坐标系下, τ 即速度的方向, 因此 v=vτ
加速度分解
自然坐标系下, 加速度可分解为切向加速度 at 与法向加速度 an, 根据微分关系可表示为
a=atτ+ann=dtdvτ+ρv2n
其中 v 为速度的大小, 不是矢量; ρ 为轨迹的曲率半径, 可通过此方法求出运动轨迹的曲率半径
点运动的合成
将点的运动向静系和动系分解, 可得到三种运动
- 绝对运动 (absolution) 动点相对于静系的运动
- 相对运动 (relation) 动点相对于动系的运动
- 牵连运动 (entrainment) 动系相对于静系的运动
解题时必须明确指出所选择的动系与计算的动点
速度合成定律
va=vr+ve
加速度合成定律
加速度合成时, 如果动系不是平动 ω=0 , 还要考虑科氏加速度 ak=2ω×vr 的影响
a=ar+ae+2ω×vr
动系动点的选择
- 动点为两个框体的交点时, 分别以两个框体为动系, 联立方程
- 没有稳定接触点时, 使用刚体的平面运动
- 有稳定接触点时, 动系的选择
- 动点不能在动系上, 否则无意义
- 动系最好与题目有关 (求动系的 ω )
- 动点轨迹易求
- 动系平动 (避免求科氏加速度)
- 动点选择
- 套筒
- 铰链
- 圆心
- 杆的一端
例题
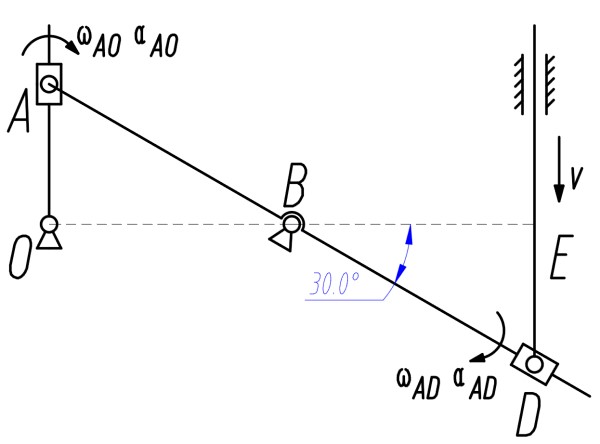
杆 DE 以 v 沿垂直滑道匀速下滑, 图示瞬间, 杆 OA 垂直, AB=BD=2r,OA∥ED. 求此时杆 OA 的角速度和角加速度
几何关系确定
AB=BD=2r
∠ABO=∠DBE=30∘,∠OAB=60∘
OA=ABsin30∘
速度分析
在速度分析前先规定机构中杆件角速度的正方向, 也可以统一采用逆时针, 便于判断科氏力的方向
从具有已知量的部分开始分析, 以未知部分杆 AB 为动系, 稳定接触点铰链 D 为动点
动点 D 为杆 DE 的一端, 且杆 DE 匀速平动, 因此其绝对速度即杆 DE 的平动速度, 方向向下, 有
vD=v
动系杆 AD 绕铰链 B 转动, 因此动系上 D 处的点的速度 (牵连速度) 方向垂直于杆, 大小满足
vDe=BDωAD=2rωAD
假设动系静止, 动点 D 所在的套筒只能沿杆 AD 平动, 因此在此瞬间, 动点 D 的相对速度沿杆方向, 大小未知
确定几个速度分量的几何关系后画出动点 D 速度简图

根据速度合成定律有
vD=vDe+vDr
由于 vDe 与 vDr 方向垂直, 因此可将矢量沿这两个方向分别分解得到
vDe=vDcos30∘=23v
vDr=vDsin30∘=21v
根据 vDe 与 ωAD 的关系还可以得到
ωAD=4r3v
从已知部分逐步分析到待求部分, 以待求部分杆 AO 为动系, 稳定接触点铰链 A 为动点
分别分析三个速度可得到如图方向关系与以下代数关系
vAe=ωAO
vA=ABωAD=2rωAD=23v
确定几个速度分量的几何关系后画出动点 A 速度简图

根据速度合成定律
vA=vAe+vAr
分别沿 x, y 轴方向 (vAe,vAr 方向) 分解可得
vAr=vAcos30∘=43v
vAe=vAsin30∘=43v
根据 vAe 与 ωAO 的关系还可以得到
ωAO=4r3v
加速度分析
按原先速度分析的顺序对加速度进行分析
由于杆 DE 匀速运动, 因此动点 D 的绝对加速度满足
aD=0
杆 AD 上的点 D 绕铰链 B 旋转, 因此需要将牵连加速度 aDe 按自然坐标系分解为法向 aDen 与切向 aDeτ, 其中
- 切向加速度的方向与速度方向相同, 垂直于杆 AD, 大小满足
aDeτ=BDαAD=2rαAD
- 法向加速度的方向指向旋转中点, 平行于杆 AD, 满足
aDen=BDωAD2=8r3v2
同相对速度, 套筒仅会沿杆运动, 因此动点 D 的相对加速度 aDr 依然为沿杆 AD 方向
注意, 由于动系杆 AD 的角速度 ωAD=0, 因此还存在科氏加速度
aDk=2ωAD×vDr=4r3v2
其中科氏加速的方向需要具体分析. ωAD 为顺时针方向, 因此矢量方向为垂直纸面向下, 与 vDr 通过右手定则得到 aDk 方向
确定几个加速度分量的几何关系后画出动点 D 的加速度简图

根据加速度合成定律
aD=aDeτ+aDen+aDr+aDk
一个矢量方程能够分解为两个独立的方程, 解出两个未知量
对于此题, 仅未知量 αAD 对于求出待求量有帮助, 因此仅求出 aDeτ 即可, 避免加速度分析中不必要的计算 (由于速度分析较简单, 且与加速度分析关联强, 因此能求出的未知量尽量求出)
为了最大程度避免额外未知量参与, 可沿待求未知量 aDeτ 方向分解矢量, 得到方程
aDeτ=−aDk=−4r3v2
根据其与 αAD 的关系得出
αAD=−8r23v2
对动点 A 进行加速度分析
由于杆 AD 绕铰链 B 转动, 因此动点 A 的绝对加速也由切向 aAτ 与法向 aAn 两部分组成, 满足
aAτ=ABαAD=−4r3v2
aAn=ABωAB2=8r3v2
同样, 杆 AO 绕铰链 O 转动, 动点的牵连加速度同样由两部分 aAeτ 与 aAen 组成, 满足
aAeτ=AOαAO
aAen=AOωAO2=16r3v2
并且动系 AO 存在角速度, 因此还有科氏加速度
aAk=2ωAOvAr=8r33v2
整理几何关系可得动点 A 的加速度简图为

根据加速度合成定律
aAτ+aAn=aAeτ+aAen+aAr+aAk
加速度分量中, aAeτ 与待求量 αAO 有关, 因此沿 αAO 方向分解 (注意等式两侧)
aAτcos60∘+aAncos30∘−8r3v2+16r33v2aAeταAO=aAeτ+aAk=aAeτ+8r33=−16r53v2=−16r253v2
解 αAO 中的负号表明其实际方向与设定的正方向方向相反
最终得到题目的解
ωAO=4r3v,↻
αAO=−16r253v2,↺
刚体的平面运动
刚体转动
在刚体上选取任意基点, 刚体上其他点相对于基点的角速度与角加速度相同
基点法
将刚体上的点的运动分解为:
- 相对于基点的转动 (刚体上两点距离不变, 只能做转动运动)
- 基点作为动系的平动
选取基点 A, 求刚体上的质点 B 的运动有
基点法求速度
vB=vA+vBA
其中
vBA=ω⋅AB
基点法求加速度
aB=aA+aBAn+aBAe
其中
aBAn=∣AB∣ω2=ABvBA2
aBAt=∣AB∣α
速度投影法
将基点法向 AB 投影可得, 对于刚体上任意两点, 满足
vA⋅eAB=vB⋅eAB
反映了刚体上任意两点距离不变的特性
速度瞬心法
- 刚体上必定存在一点 C, 满足 vC=0
- 通过对刚体上两点速度方向垂线的交线得到 C
- 如果垂线平行, 则能判断刚体平动, ω=0
- 对于刚体上任意一点 M, vM=MC⋅ω
- 速度瞬心的加速度一般不为 0
加速度投影法
- 当刚体平动 ω=0 时使用
- 此时没有法向加速度, 只有切向加速度, 表现出类似速度的性质
- 因此有加速度投影法
aA⋅eAB=aB⋅eAB
加速度瞬心
- 一般情况下加速度瞬心无法直接求得
- 如果刚体 v=0, 由于法向加速度, 加速度瞬心难以使用
- 当 v=0, 与速度瞬心性质类似, 加速度瞬心为两点加速度垂线的交点
纯滚动
- 当圆柱体 (齿轮) 等于地面没有相对滑动, 则称为纯滚动
- 设圆心 O, 接触点 A
纯滚动的运动特性
aOn=r+RvO2=r+Rr2ω2
- 当相对于运动物块纯滚动时, 则以物块为动系, 当物块平动时, 满足
aOr=rα
纯滚动的其他特性
- 对于绳子绕在圆柱上, 认为绳子与圆柱的接触点纯滚动
- 纯滚动的位置通常存在一个拉力 / 滑动摩擦力
齿轮问题
z2z1=r2r1=i12
其中 i12 为齿轮的传动比
- 齿轮 / 齿条的啮合处 C 为纯滚动, 且对于两齿轮速度相同, 满足
r1ω1=−r2ω2=vC
刚体绕平行轴转动
对于二维动系中的刚体, 满足
ωa=ωr+ωe
αa=αr+αe
曲柄固定齿轮问题
- 对于曲柄固定齿轮的角速度问题, 可以设曲柄为动系, 其他齿轮相对曲柄运动, 此时齿轮圆心相对静止, 易于计算
- 其中固定齿轮 ωa=ωr+ωe=0
- 由于要引入科氏加速度, 不适用于加速度计算
套筒问题
- 套筒内的刚体相对于套筒平动, 即刚体上各点的 vr 相同, 刚体 ωr=0
- 根据角速度叠加可得, 套筒内的刚体绝对角速度与绝对角加速度与套筒相同
- 与套筒转轴的重合点 P 上, ve=0, 因此 vr=vP (套筒为动系, P 为动点)
例题

半径为 r 的圆盘 B 在半径为 5r 的固定圆上纯滚动. 杆 OA 以匀角速度 3ω 转动, 求图示瞬间 AB 中点 C 的速度和加速度以及圆盘 B 的角速度和角加速度.
速度分析
统一采用逆时针方向为待求角速度与角加速度的方向
首先分析杆 AC

杆 AC 上的点 A 绕点 O 旋转, 此时速度 vA 方向为水平向右. 杆 AC 上的点 B 同时也是圆盘 B 的圆心, 此时 B 与固定圆圆心垂直于 OB, 因此速度 vB 方向平行于 vA. 杆 AB 上有两个平行的速度, 因此杆 AB 在此瞬间为平动, 有
vA=vB=vC=OAωAO=6rω
由于杆瞬时平动, 因此
ωAB=0
分析圆盘 B

圆盘与固定圆在接触点 D 做纯滚动, 因此 B 点的速度还满足
vB=rωB→ωB=6ω
加速度分析

点 A 在匀速转动的杆 OA 上, 因此其加速度满足
aAτ=OAαOA=0
aAn=OAωOA2=18rω2

点 B 为纯滚动圆盘的圆心, 根据纯滚动的性质, B 的加速度满足
aBτ=rαB
aBn=r+5rr2ωB2=6rω2

以 A 为基点对杆 AB 上的点 C,B 分析
其中相对加速度满足
aACτ=ACαAB,aACn=ACωAB2=0
aABτ=ABαAB,aABn=ABωAB2=0
对于点 B 有加速度合成方程
aBn+aBτ=aA+aABn+aABτ(1)
对于点 C, 由于其绝对加速度 aC 的大小与方向均无法确定, 因此将其沿杆 AB 分解为两个分量 aCx 与 aCy, 有
aCx+aCy=aA+aACn+aACτ(2)
对于方程 (1) 中有两个未知量, 可以求解. 对于方程 (2) 中有三个未知量, 可等方程 (1) 求解完后再分析 (如果方程的未知量均大于 2, 则可先尝试往特定方向分解)
方程 (1) 中未知的待求量为 aBτ(αB) 与 aABτ(αAB). 首先沿 ⊥aBτ 方向分解, 避开其中一个待求量有
aBn6rω2aABταAB=aAn−aABnsin30∘−aABτcos30∘=18rω2−0−23aABτ=83rω2=23ω2
之后沿 aBτ 方向分解, 求出另一个未知量
aBτaBταB=aABncos30∘−aABτcos60∘=0−43rω2=−43ω2
方程 (1) 中得出的 αAB 即方程 (2) 中的一个未知量, 因此此时方程 (2) 可解
沿 aCx 方向分解有
aCxaCxaCx=aACn−aAcos60∘=0−9rω2=−9rω2
沿 aCy 方向分解有
aCyaCyaCy=aAcos30∘−aACτ=93rω2−ACαAB=53rω2
综上可得
vC=6rω,方向向左
aCx=9rω2,沿AB向下
aCy=53rω2,垂直AB向下
ωB=6ω,逆时针方向
αB=43ω2,顺时针方向