静力学
大约 8 分钟
静力学
静力学基础
静力学公理
二力平衡
只受两个力的单个刚体 (任意形状) 处于平衡状态时, 两个力一定大小相同, 方向相反, 且在同一直线上
力的可传导性
单个刚体上的力可沿其作用线移动而不改变效果
三力交会平衡定理
受三个不平行的力的单个刚体处于平衡状态时, 三个力必定共面且交于一点
作用力与反作用力
相互作用的两个物体间总存在等值, 反向, 共线且分别作用于两个物体的一对力
刚化公理
平衡状态下, 可将变形体视为刚体 (平衡状态下, 可将柔绳等作为刚体)
力偶
- 两个等值, 平行, 反向的力组成的力系称为力偶
- 力偶间的最短距离 (垂直距离) 称为力偶臂
- 定义平面力偶矩 , 正负号取决于转动正方向
- 力偶矩与力偶的位置无关
约束
约束处存在约束力, 约束力大小未知, 根据主动力变化而变化
光滑接触面约束
约束力为接触点的公法线方向 (不一定是竖直方向)
铰链约束
- 铰链对两个连接体的约束力等值反向, 方向任意, 通常分解为 两个正交的未知力
- 当铰链上有两个以上物体时, 对各个物体的约束力之和为
固定铰链约束
与铰链约束相同, 由于地面通常静止, 因此铰链静止
活动铰链支座
约束力垂直于活动方向
插入端约束
插入端的各点收到多个力, 可等效为两个正交的约束力与一个约束力偶
受力分析
- 未知力以正交分量的形式表现
- 力的方向 (作用线) 确定, 大小未知时, 指向可以任意 (作为正方向)
- 可用三力汇交提前确定部分力的方向
- 先整体再部分, 分析部分注意反作用力
- 整体受力图不需要表示内力
平面力系的简化
力平移定理
刚体内的力 移动到任意一点 后得到 , 为了不改变力的作用效果, 需要再补充一个附加力偶, 力偶矩大小 , 即原来的力 对新点 之矩
分布力系的化简
- 分布力系图示中的细实线 表现了分布力强度 随位置 的变化关系
- 根据积分可得, 等效合力的大小即图形面积
- 将分布力向分布力强度图的形心 简化可不产生附加力矩
- 假设
矩形分布力系
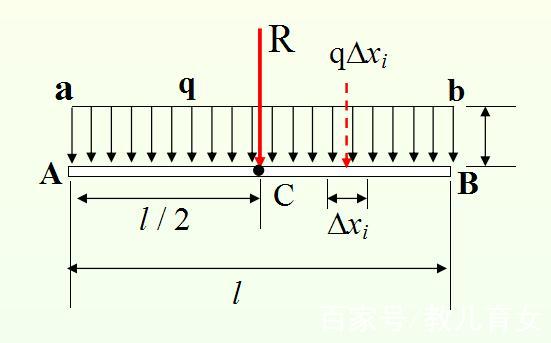
- 简化后等效合力为
- 无附加力矩的简化点为
三角形分布力系
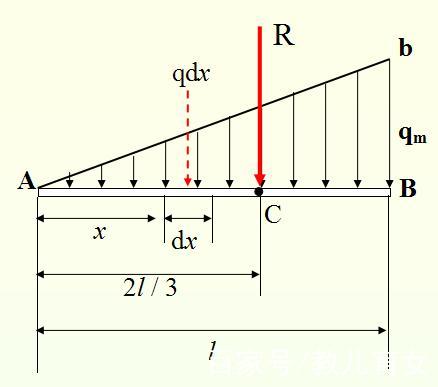
- 简化后等效合力为
- 无附加力矩的简化点为
平面力系的平衡条件
- 当平面力系平衡时, 将会满足
其中 为总和力, 为所有力对任意点之矩, 包括力偶矩
- 根据力系的化简可得, 一个平衡状态下的刚体可以提供 个平衡方程
- 可通过指定方向 与对任意点 取矩得到三个平衡方程
- 三个方程中对两点 取矩时, 不能与 分解方向垂直
- 三个方程对三点取矩时, 三点不能共线
- 对于二力杆, 取矩无意义, 仅有两个方程
平衡方程解题技巧
- 可以将平衡状态下的组合体 (部分整体) 视为一个刚体使用平衡方程
- 组合体中, 一个刚体可提供三个方程, 约束可提供等同于其约束反力数的方程, 无论从组合体还是刚体分析, 总方程数不变
- 优先分析整体, 避免内力
- 优先对多力交汇点取矩, 减小计算量
- 优先向不求力的垂直方向分解, 减小计算量
- 检查:
- 受力分析
- 方程是否少力, 少力矩
- 确认力矩方向
桁架分析
桁架构造
- 所有杆件和受力均在同一平面内
- 以三角形为结构基础
- 支座反力量不超过 个
- 所有杆均为二力杆
内力计算
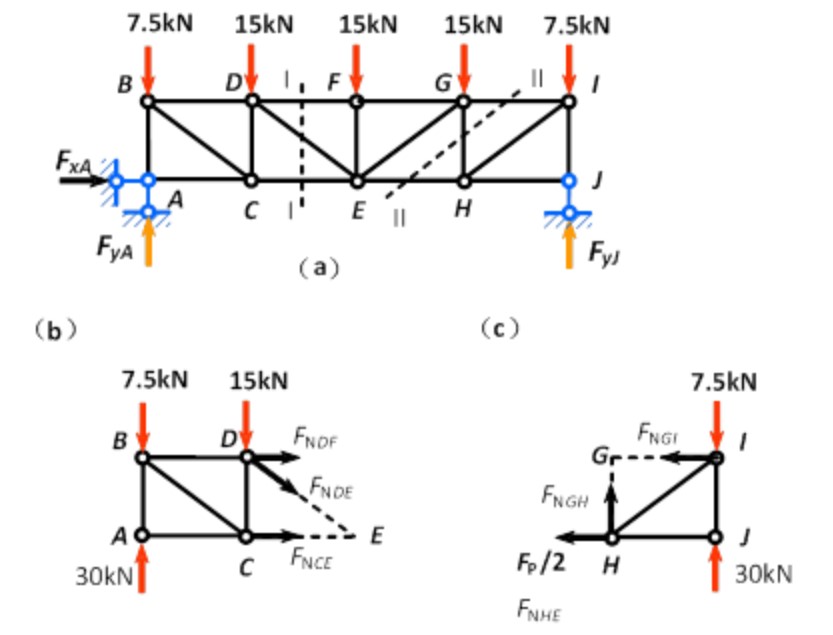
- 以杆受拉方向为内力正方向 (因此节点所受的反力方向向外)
- 沿指定方向截切桁架, 将得到部分视为刚体, 除原本所受外力外, 还受到沿被截切方向的, 来自被截切杆的内力 (拉力的反作用力, 方向与拉力相反)
- 尽量一次仅截出三个未知量, 保证三个平衡方程可解
零力杆分析
由于均为二力杆, 因此外力必定在节点处 内力计算前, 可先移去零力杆, 简化计算
- 一点两杆无外力
- 一点两杆有外力, 外力沿其中一杆的方向, 则另一杆为零力杆
- 一点三杆无外力, 其中两杆共线, 第三杆为零力杆
摩擦
滑动摩擦力
- 作用在接触点, 沿接触点切线方向
- 总是与运动趋势相反
- 随主动力增大而增大, 满足
摩擦自锁
定义
当物体所受外力 与接触点的法线夹角 时, , 物体总是保持平衡, 称为摩擦自锁
注意支持力 的方向为法线方向, 即垂直于接触面
滚动摩擦力
- 实际情况下, 接触面为一个复杂的力系, 但可以分解为 , 其中 为滚阻力偶
- 滚阻力偶总是阻止物体滚动
- 随主矩增大而增大, 满足
- 对于面接触中, 由于只能相对点翻滚, 因此在临界状态下, 可视为接触点为翻滚点的点接触 ( 作用于此点)
摩擦平衡分析
在摩擦平衡分析中, 求临界力/质量时, 仅通过平衡方程一般无法求出所有力, 因此要假设部分摩擦处于临界状态作为已知条件
- 先比较未知力 (包括未知摩擦力与摩擦滚阻) 与系统平衡方程数, 得到需要补充的临界条件数
- 轮子逆时针滚动时, 质心向左移动, 存在顺时针的滚阻, 但可能不存在向左的滑动摩擦力 (没有相对滑动)
- 轮子逆时针滚动时, 更可能出现向右滑动的趋势, 即打滑, 此时滑动摩擦力与滚阻的运动效果均与主矩相反, 更可能达到临界
- 对于任何物体均存在滚动与滑动两种趋势, 且均有两个方向 (如果没有给出 , 则不考虑滚动)
- 由于 一般较小, 因此滚动通常会是临界条件
空间力系分析
空间力矩论
对点之矩
- 对一固定点 的力矩
- 其中 为点 到力作用点的矢量
- 与平面不同, 此时力矩为矢量
对轴之矩
对于空间的轴, 只有垂直于轴的分量有转动效果, 因此力矩为
- 为力 作用点到轴的距离
- 力对轴之矩等于力对轴上任一点之矩在轴上的投影 (用于计算任意轴的矩)
空间力偶
- 定义空间力偶矢
- 其中 为力偶中两力作用点的矢量
- 空间力偶的具体指向可通过右手螺旋定则确定
- 空间力偶性质与平面力偶相同, 可以自由移动
空间力系的化简
空间力系的化简结果
对于任意空间力系可化简为
- , 力系平衡
- , 仅有一个力, 力系最简
- , 无论向那点化简, 始终为一个力偶
- , 向其他点化简可以消去 , 得到
- , 无法化简, 为一个力螺旋
空间力系的平衡条件
根据力系的化简可得, 一个平衡状态下的空间刚体可以提供 个平衡方程
与平面类似, 可以对更多的轴取矩, 但不能对通过同一点的 根以上的轴取矩, 也不能对 根以上的平行轴取矩
- 选取轴时, 不一定是在已知杆上, 也可以是空间中的两点连线
- 选择与未知量共面的轴, 避开求未知量