机械设计
大约 3 分钟
机械设计
参考书籍 机械设计 第五版 罗伯特.诺顿
第二章 材料和工艺
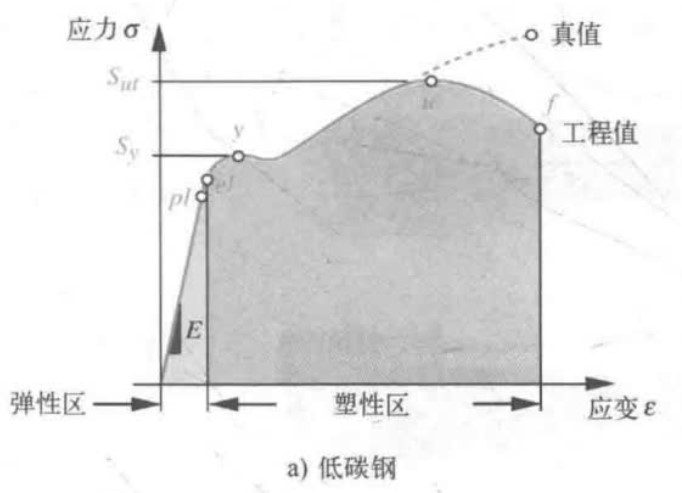
拉伸试验
应力
- 载荷 单位 N
- 原始截面
应变
通过单位长度改变量表示
弹性模量
屈服强度
屈服点处的应力, 屈服点后材料开始塑性变形
抗拉强度
开始出现缩颈前的应力, 即曲线上最大应力
塑性和脆性
塑性
- 伸长率大于 5%
- 可以任意弯曲
脆性
- 没有明显屈服点
- 断裂处没有缩颈
扭转实验
剪切模量
- 剪切应力
- 式样半径
- 标距初始长度(沿式样圆柱母线做标距)
- 扭转角度
- 剪切弹性模量/刚性模量
泊松比
- 弹性模量
- 泊松比 表示横向应变与纵向应变的比值
- 大多数材料为 0.3
耐冲击
应变能密度
- 通过对拉伸曲线积分, 得到应变能密度
- 使用应变能密度, 反应材料的耐冲击性能
回弹
- 在弹性形变范围内的区域积分
- 材料单位体积吸收能量而不产生永久形变的能力叫回弹
- 对应图中浅色部分
韧性
- 采用近似结果
- 材料断裂前单位体积吸收的最大能量
- 对应图中阴影部分
第三章 运动与受力分析
自由度
称为 DoF, 即 Degree of Freedom, 即定义物体在空间位置所需的坐标数, 包括坐标与旋转姿态
连杆
任意形状的刚体, 具有一定数量的节点
约束 (运动副) 的自由度
判断约束的自由度可通过固定约束中的一个物体下, 另一个物体的自由度来判断
自由度的简单估计
- 连杆的个数, 包括地面
- 二维取 3, 三维取 6
- 约束 (运动副) 的个数
- 约束的自由度
- 仅为估计公式, 不一定正确
平面四杆机构
Grashof 不等式
对于四杆机构, 有以下不等式
- 最短杆
- 最长杆
- 剩余杆
- 当不满足此不等式时, 没有杆可以做圆周运动
- 当等号满足时, 为平行四边形机构
- 当满足不等式时, 长度最小的杆一定能做圆周运动
典型 Grashof 机构
曲柄摇杆机构
最短的杆为曲柄, 能做圆周运动, 可将转动转化为摆动
双曲柄机构
- 最短杆为地面(机架), 由于机架无法转动, 因此体现为其他三个杆做圆周运动
- 其中一个杆做匀速运动时, 相对杆做非匀速运动
双摇杆机构
- 最短杆的对面杆为机架
- 电机无法驱动最短杆, 因此仅用电机无法实现圆周运动
平行四边形机构
存在奇异点, 即所有杆共线时, 两个短杆可以通向转动, 也可反向转动, 此时运动状态在数学上不确定
曲柄滑块机构
- 将其中一根摇杆视为无限长, 即得到曲柄滑块机构
- 曲柄滑块机构中, 有两根无限长的杆 (摇杆与机架), 因此属于平行四边形机构, 存在奇异点
- 滑块向一个方向移动, 驱动初始状态为共线(奇异点)的机构时, 无法确定曲柄的旋转方向
凸轮机构
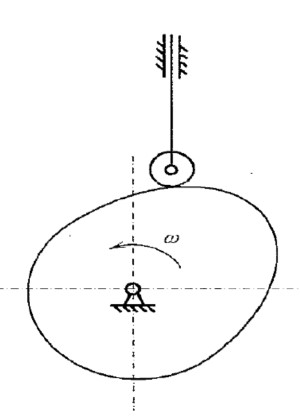 可将凸轮机构等效为平面四杆机构
可将凸轮机构等效为平面四杆机构
- 接触点瞬心可视为一个铰链