操作臂运动学
连杆参数与坐标系

在实际情况的操作臂中, 连杆可能是一个弯曲杆, 而关节具有复杂形状
但在建模时, 总将先提取出关节的轴线 (Axis) 为一条无限长的直线, 即操作臂旋转副 (Revolute Joint) 的转轴或平动副 (Prismatic Joint) 的平动方向
然后使用以下方法定义建模关节与连杆
- 定义基座开始的第一个轴线 1 到末端的每个轴线依次编号至最后一个轴线 n
- 定义连杆 (Rod) 为一条有限长的线段 (或一个点), 连杆 i−1 为轴线 i−1 与轴线 i 间的公垂线, 共有 0∼n 个关节
- 最后一个轴线 n 上的连杆 n 则根据末端执行器要求定义
- 有时定义基座为连杆 0, 其另一端点为与底面的固连点
- 规定关节 (Joint) 为一个点, 关节 i−1 为轴线 i−1 与连杆 i−1 的交点, 共有 1∼n 个关节
注意, 以上建模产生的操作臂模型仅实际操作臂的轴线信息, 并不一定反应实际的关节与连杆
连杆坐标系
一般情况下通过如下方式规定连杆 i−1 的坐标系
- 原点为关节 i−1 的所在点
- z 轴与轴线 i−1 共线, 正方向可任意规定, 可先选择方便建模的一侧为正, 最后根据电机正转方向调整
- x 轴与连杆 i−1 共线, 以关节 i−1 所在点指向关节 i 所在点为正
- y 轴通过 z 轴到 x 轴的右手定则确定
称连杆 i−1 的坐标系为 {i−1}, 其中基座坐标系为 {0}
连杆参数
首先通过运动的方式描述坐标系之间的联系
即通过坐标系 {i−1} 运动到坐标系 {i} 的运动描述连杆参数
- 绕运动坐标系 x 轴正方向旋转角度 αi−1, 有运动算子 bR(x,αi−1), 通过该旋转使 z 轴与轴线 i 平行
- 沿运动坐标系 x 轴正方向移动距离 ai−1, 有运动算子 bD(x,ai−1)
- 绕运动坐标系 z 轴正方向旋转角度 θi, 有运动算子 bR(z,θi), 通过该旋转使 x 轴与连杆 i 平行
- 沿运动坐标系 z 轴正方向移动距离 di, 有运动算子 bD(z,di)
在实际中, 以上参数分别有以下含义
- αi−1 表示轴线 i−1 与 i 之间的夹角, 该参数为一个与操作臂有关的常数
- ai−1 表示连杆 i−1 的长度, 该参数为一个与操作臂有关的常数
- θi 表示连杆 i−1 与 i 之间的夹角, 当关节为旋转副时, 连杆 i 可绕轴线旋转, 因此是一个变量, 仅存在初始姿态偏置
- di 表示连杆 i−1 与轴线 i 交点与关节 i 的距离, 当关节为移动副时, 关节 i 可沿轴线平移, 因此是一个变量, 仅存在初始姿态偏置
以 αi−1,ai−1,θi,di 四个参数为一组, 每组参数都可以描述连杆坐标系 {i−1}→{i} 的关联, 对于一个 n 关节的操作臂, 即需要 n 组参数描述
并使用如下所示的连杆参数表表示
| i | αi−1 | ai−1 | θi | di | 变化范围 |
|---|
| 1 | 0∘ | 0 | θ1(90∘) | 0 | −160∘∼160∘ |
| 2 | −90∘ | 430 | 0∘ | d2(0) | 0∼20 |
| … | … | … | … | … | … |
| n | 90∘ | 0 | 0 | 0 | −266∘∼266∘ |
其中
- 编号 i 表明该行参数体现了坐标系 {i−1}→{i} 的参数, 或连杆 i−1 的参数
- 对于不随运动改变的常量参数直接填写
- 对于变量参数则使用格式 θi(…), 即直接写出符号, 然后在括号内写入初始值
- 必要时可在最后加上该组参数中的变量参数的变化范围
操作臂建模的一般方法
n 关节的操作臂建模即找出 n×4 个连杆参数, 并写成连杆参数表
一般可遵循以下步骤
- 保证操作臂处于特定状态, 保证尽可能多的连杆坐标系 {i} 的三个坐标轴与固定坐标系的任一坐标轴平行
- 确定并画出操作臂 1∼n 号的轴线, 使用双点划线表示, 并在末端编号 AiR/P, 其中 R 表示旋转副, P 表示移动副 (画图时可采用斜二测画法, 且沿坐标轴方向的虚线表示点或轴线之间的位置关系)
- 从坐标系 {0}→{n} 依次确定, 并在图上标出 x,z 轴, 以及关节 i 的运动方向及变量参数
对于坐标系 i−1
推荐先通过以下步骤, 在轴线图中找出各个关节坐标系的原点 - 对于一般情况, 使用连杆坐标系的基本定义
即以连杆 (轴线 i−1 与 i 的异面直线) 在轴线 i−1 的交点为坐标原点, z 轴沿轴线方向, x 轴沿连杆方向, 以指向轴 i 为正方向 - 对于轴线 i−1 与 i 相交时, 连杆 i−1 为一个点
以交点为坐标系原点, x 轴方向垂直于轴线 i,i−1, 即 xi−1=±zi×zi−1 - 对于轴线 i−1 与 i 平行时, 存在无数条合法的连杆 i−1
可使用以下两种原则之一选择原点, 坐标轴方向确定同一般情况 - 取轴线 i−1 上与实际关节相关联的点为坐标系原点 (尽可能与实际关联原则, 此时 d 根据实际选取)
- 取连杆 i−2 在轴线 i−1 上的交点为坐标系原点 (尽可能多参数为 0 原则, 此时 di−1=0)
- 对于轴线 i−1 与 i 重合时, 存在无数条合法的连杆 i−1, 且均为点
原点选择原则类似平行的情况, x 轴尽可能与坐标系 {i−2} 的 x 或 z 轴平行 (尽可能多参数为 0,90∘) - 对于基座坐标系 {0}, 可使用以下两种原则之一确定
- 基座坐标系 {0} 与坐标系 {1} 重合 (尽可能多参数为 0 原则, 此时第一组参数全为 0)
- 基座坐标系 {0} 的原点为轴线 1 与地面的交点, z 轴位于轴线 1 上, x 轴与参考坐标系的 x 或 z 轴平行 (尽可能与实际关联原则, 此时仅 a0,α0=0)
- 对于末端坐标系 {n}, x 轴与坐标系 {n−1} 的 x 轴平行, 原点使用以下两种原则之一确定
- 以连杆 n−1 与轴线 n 的交点为原点 (尽可能多参数为 0 原则, 此时 dn=0)
- 根据实际情况选择轴线 n 上与实际执行器相关联的点为原点 (尽可能与实际关联原则, 此时 d 根据实际选取)
- 根据坐标轴依次确定各组参数
- 单独画出坐标系 {i−1} 与 {i}, 并且在接下来每步尽量画出中间坐标系
- 绕运动坐标系 x 轴旋转 αi−1, 使其 z 轴与 zi 平行
- 沿运动坐标系 x 轴平移 ai−1, 使坐标原点移动到轴线 i 上
- 绕运动坐标系 z 轴旋转 θi, 使其 x 轴与 xi 平行
- 沿运动坐标系 z 轴平移 di, 使坐标原点与 {i} 重合
简单来说建模应当遵守以下原则
- 尽量使模型与实际相结合, 如坐标系原点的确定 (使用该原则时, 最好能使坐标系 {n} 的原点与实际操作臂的末端重合)
- 尽量使参数为 0 或 90∘, 为上一原则的补充
- 便于建模原则, 如坐标轴方向的确定
- 如果已经给出了特定关节的坐标系, 特别是首末关节, 则优先使坐标系满足给出的要求
操作臂建模举例
对于如图所示的 PUMA560 机械臂
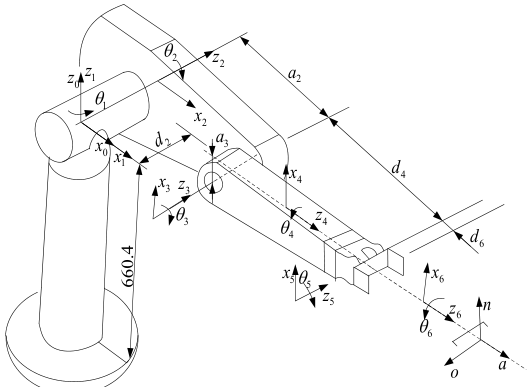
建模时按两步画出如下轴线与连杆坐标图

图中
- 坐标系 {0} 使用尽可能为 0 的原则, 使坐标系 {0} 与 {1} 重合
- 坐标系 {2} 原点选取使用了与实际相符原则, 保证剩余的坐标系原点位于实际机械臂末端所在的 YOZ 平面
- 注意坐标系 {3} 与 {4} 之间在 x3 方向偏距 a3 来自轴线 A3R,A4R 之间的位置关系
由坐标系图可得到操作臂的连杆参数表
| i | αi−1 | ai−1 | θi | di |
|---|
| 1 | 0∘ | 0 | θ1(0∘) | 0 |
| 2 | −90∘ | 0 | θ1(0∘) | d2 |
| 3 | 0∘ | a2 | θ1(−90∘) | 0 |
| 4 | −90∘ | a3 | θ1(0∘) | d4 |
| 5 | 90∘ | 0 | θ1(0∘) | 0 |
| 6 | −90∘ | 0 | θ1(0∘) | 0 |
正向运动学
三种描述空间
对于三维空间中的 n 关节操作臂, 定义三种描述空间
- 操作空间, 即包含了所有操作臂的末端位姿 T 的空间, 由于是在三维空间中, 因此操作空间共有位置与姿态共 6 个独立参数
- 关节空间, 由操作臂 n 个关节变量 qi (将旋转变量 θi 与平动变量 di 变量统称为 qi) 组成的空间, 关节空间包含了所有关节变量组成的矢量 q
- 驱动空间, 对于非直接驱动的操作臂, 从驱动器的驱动量 si 到关节变量 qi 还需要经过一次传动机构的转换. 驱动空间即由这 n 个驱动量组成 (对于简单的直接驱动操作臂可以不考虑)
通过运动学方程 T=T(q) 可实现关节空间到操作空间的映射, 即正向运动学
相反求出操作空间到关节空间的映射为反向运动学, 即已知末端姿态 T, 求出关节变量 q
坐标系规定
在操作臂的实际使用中, 通常定义如下坐标系
- {B} 基座标系 Base, 即关节坐标系 {0}
- {W} 手腕坐标系 Wrist, 即末端关节坐标系 {n}
- 与基座标系间存在关系 WBT=n0T(q)
- {S} 工作站坐标系 Station, 通常固接在工作台角点上, 用于规划路径时描述操作臂的姿态, 因此也成为固定坐标系或作业坐标系
- 通常通过基座标系定义, 并作为不变的已知条件 SBT
- {T} 工具坐标系 Tool, 固接在末端执行器端部 (对于手爪则为两指的终点) 的坐标系, 以表示末端执行其的位姿
- 通常通过手腕座标系定义, 并作为不变的已知条件 TWT
- {G} 目标坐标系 Goal, 用于描述机器人末端执行其应当达到的位姿, 通常运动结束时应当与 {T} 重合
- 通常通过工作站标系定义, 在反解时作为已知条件 TST
连杆变换矩阵
由连杆参数以及通过运动描述位姿可知, 对于在连杆坐标系 {i−1} 下描述坐标系 {i} 时有齐次矩阵
Ti−1→i= ii−1T(qi)=bR(x,αi−1)bD(x,ai−1)bR(z,θi)bD(z,di)
根据坐标系变换方法, 组合各个连杆间的齐次矩阵, 即可得到正向运动学的运动方程
WBT=n0T(q)=10(q1)T21(q2)T… n−1n−2(qn−1)T nn−1T(qn)
对于同一个操作臂, 无论连杆参数如何选择, 只要坐标系 {0},{n} 相同, 都能得到相同的正向运动学方程 WBT=n0T(q)
当关节位移带有偏置时, 如果要使用新的参数注意代换 qi=qi′+so, 即以带偏置的关节位移 qi′ 代换变换矩阵中的原位移 qi
例如带偏置的旋转关节 θi(90∘), 则有 qi+90∘=θi, 在变换矩阵中 (可以在最后才带入代换)
{sin(θi)→sin(qi+90∘)=cos(qi)cos(θi)→cos(qi+90∘)=−sin(qi)
逆向运动学
逆向运动学的解
对于正向运动学, 对于一组给定的关节变量 q, 能得到唯一对应的末端姿态 WBT
但对于逆向运动学的解 (也称为反解), 往往存在多个解或是无解的情况
逆向运动学解的解析性
由于逆向运动学通常涉及超越方程, 因此可能不存在解析解, 只有数值解
为了保证工业机器人能灵活求出反解, 要求满足以下解析解存在的充分条件之一 (Pieper 准则)
逆向运动学的可解性
将操作空间中, 由存在反解的点所构成的区域称为工作空间, 并且再进一步分为以下两种
- 灵活操作空间 操作臂的末端执行器能以任意姿态到达该区域中的任意一点
- 可达空间 操作臂的末端执行器能以至少一个姿态达到该区域中的一点
通常
- 灵活操作空间时可达空间的一个子集, 一般可达空间由灵活操作空间与操作臂奇异位姿所在点 (奇异点) 组成
- 在三维中, 如果机器人的自由度小于 6, 则其不存在灵活操作空间
逆向运动学解的多解性
逆向运动可解时, 还存在多解的问题, 通常需要在多解中寻找一个最优解
为了让运动更灵活, 工业机器人也会刻意设计使其解尽量多
- 由于翻转问题, 操作臂中相邻的连杆长度 ai,ai+2 为零的连杆越多, 离散解越少
当所有连杆长度均不为 0, 最多有 16 个反解 - 当操作臂的关节数大于 6, 表明其具有冗余的自由度, 此时操作臂将具有无穷个连续的反解
PUMA560 的 Pieper 反解
对于 PUMA560, 由其连杆参数可知, 该操作臂满足 Pieper 条件, 因此逆向运动学存在解析解
由于该操作臂的最后三个关节 4,5,6 的原点重合, 不存在任何平移, 因此齐次矩阵 63T(θ4,θ5,θ6) 仅与操作臂的手腕 {W} 姿态有关, 且矩阵 63T 的第四列向量 3p6o=3p4o 为一个仅与关节参数 α3,a3,d4 有关的常量
因此可得, 操作臂的手腕位置仅由变量 θ1,θ2,θ3 决定, 可将运动学反解分为两步
- 第一步通过给定腕部位置 0p6o 解出参数 θ1,θ2,θ3
- 结合已解出参数 θ1,θ2,θ3 与腕部姿态 60R 解出参数 θ4,θ5,θ6
腕部位置反解
腕部位置分解即求解方程
0p6o=0p4o=10T(θ1)21T(θ2)32T(θ3)3p4o
具体求解过程省略, 求解方程如下
有关中间变量
首先规定如下一组仅与变量 θ3 有关的中间变量, 且有形式 f=Acosθ3+Bsinθ3+C
⎩⎨⎧f1(θ3)=a3cθ3+d4sα3sθ3+a2f2(θ3)=a3cα2sθ3−d4sα3cα2cθ3−d4sα2cα3−d3sα2f3(θ3)=a3sα2sθ3−d4sα3sα2cθ3+d4cα2cα3+d3cα2
然后对应如下一组仅与中间变量 f1,f2,f3 有关的中间变量
⎩⎨⎧k1=f1k2=−f2k3=f12+f22+f32+a12+d22+2d2f3k4=f3cα1+d2cα1
θ3 与 θ2 求解
有如下关于 θ3,θ2 的方程 (其中 0p6o2=r2,0z6o=z)
{r2=2a1(k1cosθ2+k2sinθ2)+k3z=sinα1(k1sinθ2−k2cosθ2)+k4
- 当 a1=0 或 sinα1=0, 其中一个方程退化为仅与 θ3 有关, 以此可解出 θ3
- 对于一般情况, 可消去 θ2 得到仅与 θ3 有关的方程 4a12(r2−k3)2+sin2α1(z−k4)2=k12+k22
在实际求解 θ3 时, 一般还会定义变量 u=2tanθ3 转换方程中的三角函数, 使方程完全转换为关于 u 的四次方程
转换公式如下
u=tan2θ3,cosθ3=1+u21−u2,sinθ3=1+u22u
根据上述关于 θ3,θ2 的方程组可得 (注意该笔记中四象限反正切的定义与常见相反)
⎩⎨⎧m=2a1r2−k3n=sin(α1)z−k4b=k2k1+k1k2→θ2=Arctan[(k2m−k1n)/b,(k1m+k2n)/b]=Arctan[mk1−nk2,mk2+nk1]
θ2 通过分式上下乘以 k1k2 得到, 并通分消去分母 k12+k22≥0
θ1 求解
对于 θ1 的求解还需要引入以下两个与 θ2,f 有关的中间变量 (带入之前求解结果 θ2,θ3 即可得出)
{g1=f1cθ2−f2sθ2+a1g2=f1cα1sθ2+f2sα1cθ2−f3sα1−d2sα1
θ1 满足方程组 (其中 0x6o=x,0x6o=y)
⎩⎨⎧x=g1cθ1−g2sθ1y=g1sθ1+g2cθ1b=g2g1+g1g2→θ1=Arctan[(g1y+g2x)/b,(g2y−g1x)/b]=Arctan[yg2+xg1,yg1−xg2]
腕部姿态反解
不考虑原点位置, 仅考虑姿态 R, 由操作臂结构可知, 运动方程中, 仅 63R 与最后三个关节变量 θ4,θ5,θ6 有关
又由于 θ1,θ2,θ3 已通过腕部位置反解得到, 腕部姿态 60R 为已知的反解条件, 有
60R30RT60R=30R63R=63R
由连杆变换矩阵可得, 姿态矩阵 63R 由连续三次的, 每次绕运动坐标系的 x,z 轴旋转

如图所示, 对于姿态矩阵 63R 有如下特点
- 由于 α4,α5=±90∘
- 取 90∘ 时, 相当于将 z 轴移动到 y 轴位置, y 轴移动到 −z 轴位置
- 取 −90∘ 时, 相当于将 y 轴移动到 z 轴位置, z 轴移动到 −y 轴位置
- 对于如上图所示的情况, 上方为一般旋转过程, 下方为忽略 α 的旋转, 即 zyz 欧拉角
- θ4 即绕经过 α3 旋转后的 z4′ 旋转
- θ5 绕 z5′ 旋转相当于绕运动坐标系的 −y 旋转
- θ6 绕 z6′ 旋转相当于绕运动坐标系的 z 旋转
- 因此将绕经过 α3 旋转后的坐标系为起点, 得到目标坐标系 60 相当于经历一次 zyz 的欧拉角
对于图示情况, 有 Rzyz(θ4,−θ5,θ6)=R(x,α3)T63R
- 根据 α4,α5 取值的正负决定了 θ5,θ6 与欧拉角求解结果 β,γ 之间的关系
- 当 α4=90∘,α5=−90∘, 另外两个参数对应, 但 θ5=−β
- 当 α4=−90∘,α5=90∘, 腕部关节参数与欧拉角参数一一对应
- 剩余情况可使用如图所示的方法推断
- 在使用欧拉角求解 θ4,θ5,θ6 前, 应当对 63R 右乘 R(x,α3)T 以消除 α3 的影响, 保证剩余的部分为标准 zyz 约定的欧拉角
类似的有数学证明 带入 63R
RT(x,α3)63R=R(z,θ4)[R(x,90∘)R(z,θ5)][R(x,−90∘)R(z,θ5)]=R(z,θ4)cosθ50sinθ5−sinθ50cosθ50−10cosθ60−sinθ6−sinθ60−cosθ6010
与 zyz 欧拉角对比 列与行的相似性 置换矩阵自身为逆
Rzyz(α,β,γ)=R(z,α)R(y,β)R(z,γ)=R(z,α)(cosβ0−sinβ010sinβ0cosβ1000010−10)(10000−1010cosγsinγ0−sinγcosγ0001)=R(z,α)cosβ0−sinβsinβ0cosβ0−10cosγ0−sinγ−sinγ0−cosγ010
可得 α=θ4,β=−θ5,γ=θ6
由姿态矩阵求解 zyz 欧拉角参数 Rzyz(α,β,γ) 时有公式 (当 β=0,180∘, 关节处于奇异状态, 一般取 α=0,γ=Arctan(r11,−r12))
⎩⎨⎧β=Arctan(r33,r312+r322)α=Arctan(r13,r23)γ=Arctan(−r31,r32)
根据 Rzyz(α,β,γ)=R(x,α3)T63R 解出 α,β,γ
再根据 α4,α5 确定 θ4,θ5,θ6 与 α,β,γ 的关系, 完成腕部的反解
通过翻转腕部, 还存在一组反解与原始解存在关系
θ4′=θ4+180∘,θ5′=−θ5,θ6′=θ6+180∘
因此 PUMA560 共有 4×2=8 种不同的反解结果
PUMA560 的 Paul 反解