中级视觉
Harris 角点检测
角点检测原理
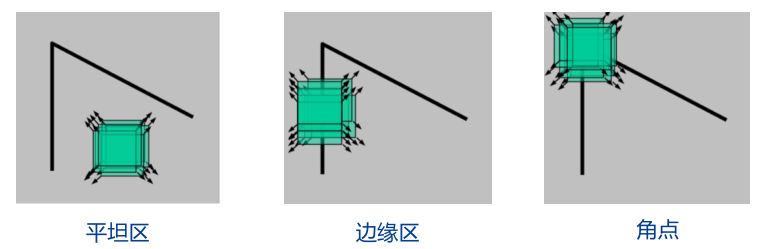
在数学上定义角点时, 规定一个以点 P 为中心的窗口 W, 当窗口沿任意方向移动时, 窗口内的灰度均发生了明显变化, 则认为点 P 为一个角点
- 当窗口沿任意方向移动灰度变化小, 则为平坦区
- 当窗口沿特定方向移动灰度变化大, 垂直方向变化小, 则为边缘区
- 当窗口沿任意方向移动灰度变化大, 则为角点
衡量窗口灰度变化时使用如下误差函数
E(u,v)=(x,y)∈W∑ω(x,y)[F(x+u,y+v)−F(x,y)]2
其中
- u,v 为窗口的移动距离
- F(x,y) 为原始图像上点 x,y 的像素值
- ω(x,y) 为加权函数, 通常即高斯滤波卷积核
- 公式即使用窗口移动前后对应点误差的平方和衡量灰度变化
区域特征值与特征向量
根据泰勒展开
F(x+u,y+v)≈F(x,y)+u∂x∂Fx,y+v∂y∂Fx,y
使用 Sobel 算子得到的图像梯度代替其中的导数, 可得此时对应点 (x,y) 的误差的平方和满足 (注意其中的矩阵不是二阶偏导矩阵)
[F(x+u,y+v)−F(x,y)]2≈[[GxGy](x,y)[uv]]2≈[uv][Gx2GxGyGxGyGy2](x,y)[uv]
通过泰勒展开可排除 E(u,v) 中移动位置的影响 ([uv] 可视为常数提出), 定义自相关系数矩阵 M 满足 (注意 M 为窗口中一系列梯度矩阵的加权和)
M=(x,y)∈W∑ω(x,y)[Gx2GxGyGxGyGy2](x,y)
将自相关系数矩阵相似对角化后, 此时的误差函数满足
E(u,v)≈[uv]M[uv]≈[uv]Q[λ1λ2]QT[uv]
因此像素点 P(x,y) 的误差函数 E(u,v) 可以近似为一个二次型, 二次型的特征值 λ1,λ2 反映了窗口随不同方向移动时误差变化的最快与最慢方向, 由角点的数学定义可知
- 当 λ1,λ2 均很小时, 为平坦区
- 当 λ1 很大, λ2 很小时, 为边缘区
- 当 λ1,λ2 均很大时, 为角点
角点响应函数
在实际使用时, 在得到自相关系数矩阵 M 一般通过以下角点响应函数 R 判断其是否满足角点的特点, 函数值越大表明约有可能是角点
- R(M)=det(M)−αtr2(M)=λ1λ2−α(λ1+λ2)2,α≈0.06
- R(M)=λ1−αλ2,α≈0.05
取大于阈值部分的局部最大值点作为检测到的角点
Canny 边缘检测
边缘检测准备
在进行边缘检测前, 首先需要用高斯滤波去除图像的噪声
之后还需要使用 Sobel 算子计算出图像各点沿 x,y 方向的差分 Gx,Gy
通过两个方向的差分可以计算出图像的图像的梯度大小 S 及方向 θ 满足
{S=θ=Gx2+Gy2Arctan(Gy,Gx)
非极大值抑制
根据导数的特点, 当函数在点 P 上有最大的变化率时, 其一阶导数必定在 P 处有极值
非极大值抑制正是基于这一原理筛选出可能的边缘点
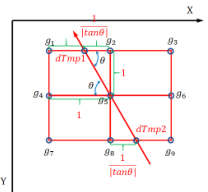
对于像素点 P 的梯度方向 θ, 使用如图所示的方法, 通过 P 八邻域内的像素点插值得到 P 梯度方向上前后两点的梯度大小
然后比较 P 与其前后两点的梯度大小, 当 P 的梯度 S 大于前后两点则作为可能的边缘点保留
双阈值滤波
对于非极大值抑制中得到的边缘点进行滤波
- 对于阈值下界 T1 与上界 T2
- 梯度大于上界的必定为边缘点
- 小于下界的必定不是边缘点
- 在上下界中, 与边缘点相连的点也视为边缘点
纹理分析
纹理一般表述为图像强度局部变化的重复模式, 是图像粗糙性, 光滑性, 规则性等度量
灰度共生矩阵分析
灰度共生矩阵中的元素, 表示的是具有某种空间位置关系的两个像素灰度的联合分布
对于 8 位灰度图片的一个方向, 灰度共生矩阵为 R256×256 的矩阵
- 首先定义扫描方向 (a,b), 通常共有 0,45,90,135∘ 四个扫描方向
如 a=1,b=0 表示沿 0∘ 方向扫描; a=−1,b=1 表示沿 135∘ 方向扫描 - 扫描点 (x,y) 与扫描方向下的点 (x+a,y+b) 的灰度组成灰度对 (f1,f2)
- 使用 R256×256 的灰度共生矩阵, 矩阵中 (i,j) 元素表示了灰度对 (f1,f2) 出现的概率 (频次除以总对数)
- 通过对灰度共生矩阵的以下统计, 确定纹理特性
- 角二阶矩 纹理细度
- 熵 纹理随机性
- 对比度 局部变化
- 反差分矩阵 纹理规则程度
傅里叶频谱分析
通过观察纹理图片的中心化傅里叶频谱图可用于分析纹理的特性
- 对于纹理较粗的图像, 能量集中在离原点较近的范围内, 这些点有较大的幅值, 细纹理相反
- 对于条纹纹理, 使用阈值二值化的频谱图在垂直于图像纹理方向上, 将体现为一条直线带
局部二值分析
对于点 P 的局部二值为
- 取出点 P 半径为 R 的圆形领域中的点
- 分别比较圆周点与中心点 P 的灰度, 并由比较结果组成一个二进制序列作为局部二值结果
- 具有对比度与旋转不变性
自相关函数
- 求出图像自身对自身的卷积, 得到自相关函数
- 粗纹理自相关函数随距离增大下降速度较慢, 细纹理相反
- 如果纹理基元中灰度呈周期变化, 则自相关函数的升降也呈周期性变化
图像变形
图像变换矩阵
- 使用二维齐次变换矩阵 T 描述平移, 旋转, 缩放, 错切等基础变换
输入图片 F 与变换后的图片 F′ 之间满足 F(p)=F′(Tp) - 图像变换时一般有以下使用 Inverse Warping 策略
- 遍历变换后的图片 F′(p) 中的每一个像素点 (注意 p 的元素值为离散的)
- 对于点 p 在变换后图片的像素值有 F′(p)=F(T−1p)
- 由于 F 中的已知点的坐标均为离散的整数, 但 T−1p 可能是小数, 因此需要插值
最近邻插值
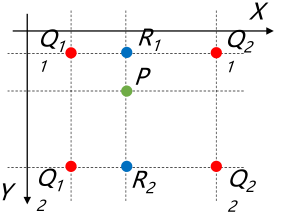
- 当 p 坐标为小数时, 其必定落在网格的中间
- 对于一个网格的四个角点分别为四个灰度已知的原图像素点 Q11,…,Q22
- 以四个角点中, 离点 p 最近的像素点的像素值作为插值结果
- 插值计算量小, 但马赛克效应较强
双线性插值
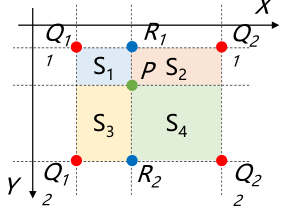
- 同上, p 将落在网格中, 且有四个邻近的已知像素点
- 通过做 p 的水平与垂直分线, 将网格划分为四个小块
角点对角位置的小块面积体现了其对于点 p 取值的贡献 - 因此 p 的插值结果满足
F(p)=S4⋅F(Q11)+S3⋅F(Q21)+S2⋅F(Q12)+S1⋅F(Q22) - 插值计算量大, 但马赛克效应较小
霍夫变换
在霍夫变换前, 通常需要先使用 Canny 算子提取出二值化的边缘点, 再对二值化的点进行进一步处理
霍夫直线变换
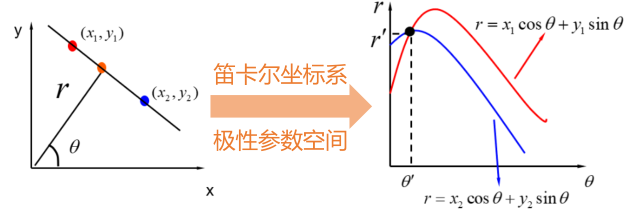
对于方程 r=xcosθ+ysinθ
- 如果 r,θ 确定, 则该方程可以表示为一条直线
参数 r 反映了直线到原点的距离, 参数 θ 表示原点到垂足的方向角 - 如果 x,y 确定, 则该方程可以表示为一条正弦曲线
正弦曲线上的每一个点 (r,θ) 都可以作为一条过点 (x,y) 的直线的参数
根据以上原理可以得到如下直线检测算法
- 确定距离 r 与角度 θ 的分辨率以及范围, 根据分辨率与范围得出统计刻度以及对应的统计表
- 遍历边缘点, 对每个被遍历点 (x,y) 得到对应的正弦曲线, 并计算各个 θ 刻度下对应的 r
- 对于每个计算得到的 (θ,r) 都使统计表定义位置的计数加一
- 将统计表称为图像的霍夫直线变换, 以其中大于给定阈值的点 (r^,θ^) 作为匹配到的直线结果
霍夫圆变换
略