PID
注意
该笔记仅在旧笔记的基础上进行归类, 尚未对格式进行修复
通过改变输出量, 使输入量达到目标值 有关教程open in new window
U(t)=KPerr(t)+TKI∫err(t)dt+TKDdtderr(t)
名词
- U(t) 输出量
- N(t) 输入量(需要控制的量)
- err(t)=N目标(t)−N实际(t) 输入量误差
- T 系统经过的时间
- P proportion 比例
- I integration 积分
- D differentiation 微分
- K 系数
比例控制算法
U(t)=KPerr(t)
当有阻力消耗时, 存在稳态误差, 无法达到目标值 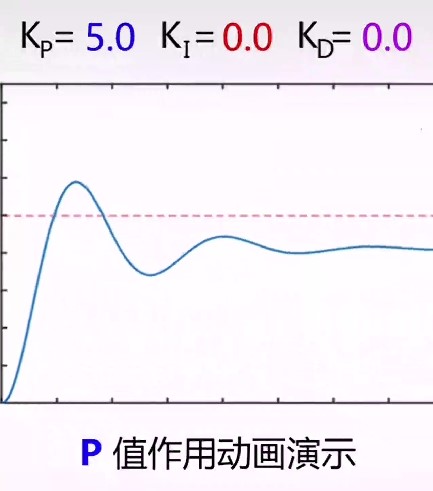
积分控制算法
U(t)=KPerr(t)+TKI∫err(t)dt
将前面若干次的误差进行累计,可以很好的消除稳态误差 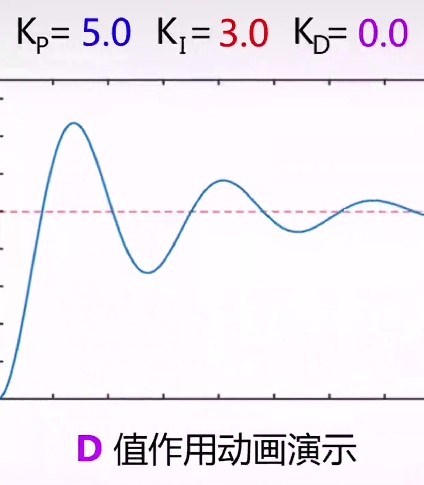
微分控制算法
U(t)=KPerr(t)+TKI∫err(t)dt+TKDdtderr(t)
可以防止实际输入量超过目标输入量,即减少控制过程中的震荡 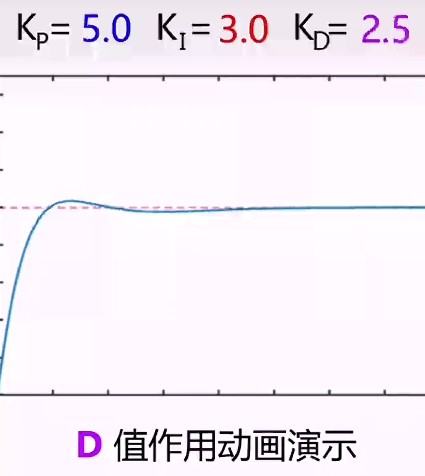
离散化
- 积分的离散化
TKI∫err(t)dt=TKI∑err(t)dT=KI∑err(t)
- 微分的离散化
TKDdtderr(t)=KD[err(t)−err(t−dt)]dtT=KD[err(t)−err(t−dt)]
- 离散化的总公式
U(t)=KPerr(t)+KI∑err(t)+KD[err(t)−err(t−dt)]
具体使用
对于系数 KP, KI, KD 均需要通过实验得到, 且积分控制与微分控制在部分情况下并不是必须的